

EVA
Harvesting machine with artificial vision search algorithm
Scheda del progetto

MgM Robotics srl

Università di Torino
ALPIrobot srl




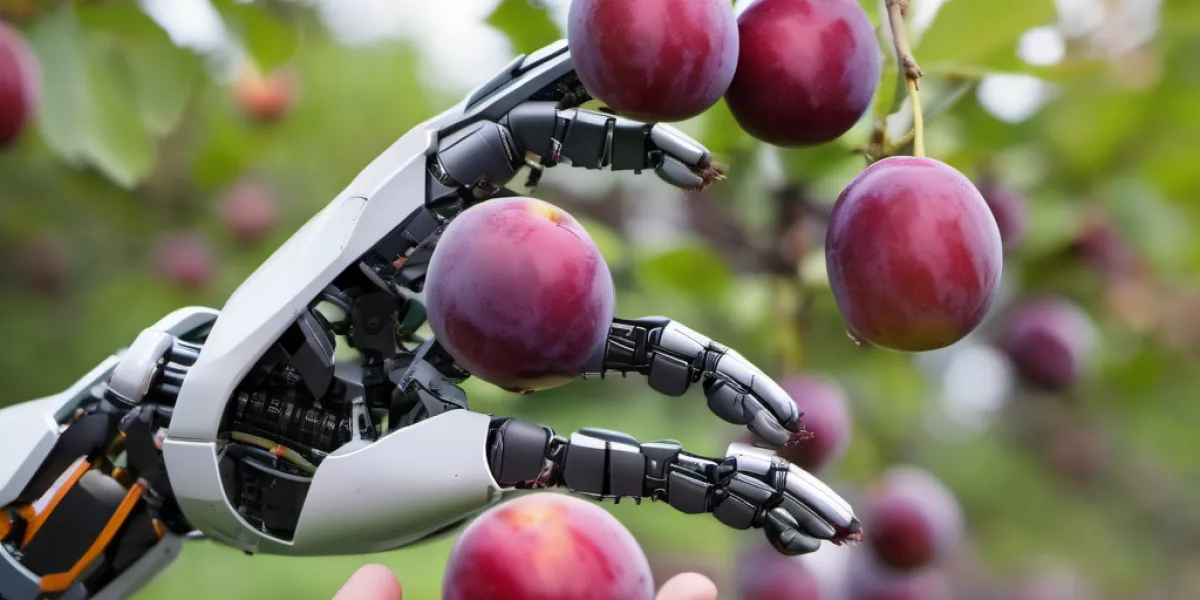
EVA aims to develop a robotic machine capable of automatically harvesting fruit from trees, particularly plums. The machine, which will move autonomously in the orchard, will be equipped with an artificial vision system to manage its harvesting approach. The project is part of a precision agriculture framework, with the goal of industrialising the fruit harvesting process to increase the value of agro-industrial production.
Contacts:
Mariano Gabriel Marchetti
mariano.marchetti@mgmrobotics.it
The main challenge is to innovate and automate a sector where current processes remain largely manual. Drawing on experience in industrial automation and the urgent need to address current issues in fruit harvesting, the two project partners conceived the idea of automating a traditionally manual process, thus bringing the world of industrial automation to the countryside.
Technologies already known in the industrial sector are being used for the first time to make fruit harvesting less burdensome for operators and to ensure a significantly more consistent process than currently exists. The combination of autonomous mobility and robotics allows for the creation of a highly technological system that fits within the economic target for harvesting agricultural machinery.
The system is designed to make the fruit harvesting process less laborious, ensuring a consistent workflow during peak periods. The end user will experience cost reductions alongside increased efficiency compared to current manual processes, as well as maximum flexibility in harvesting according to their needs.