

EVA
Harvesting machine with artificial vision search algorithm
Scheda del progetto

MgM Robotics srl

Università di Torino
ALPIrobot srl




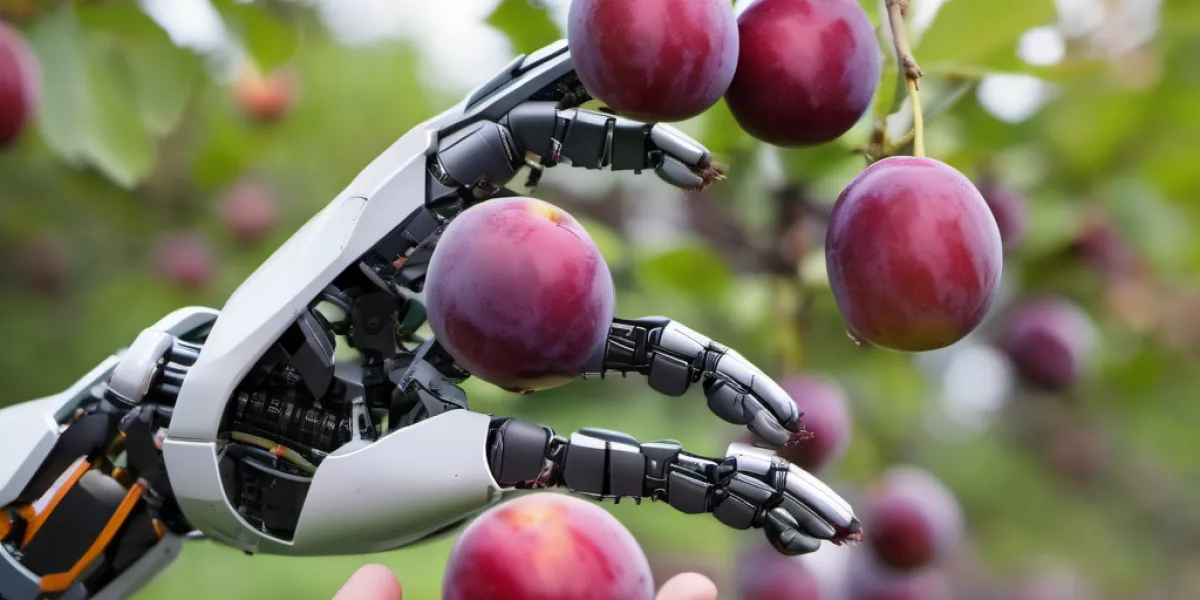
EVA ha l'obiettivo di realizzare una macchina robotica in grado di raccogliere automaticamente i frutti dagli alberi, in particolare dai susini. La macchina, che si muoverà autonomamente nel frutteto, sarà dotata di sistema di visione artificiale per controllarne l'approccio di raccolta. Il progetto si colloca in uno scenario di agricoltura di precisione, punta all'industrializzazione del processo di raccolta della frutta per aumentare il valore delle produzioni agroindustriali.
Contatti:
Mariano Gabriel Marchetti
mariano.marchetti@mgmrobotics.it
La sfida principale è quella di innovare ed automatizzare in un settore dove i processi attuali rimangono prettamente manuali. Dall’esperienza nel settore dell’automazione industriale e la necessità imminente di risolvere gli attuali problemi di raccolta frutta, nasce l’idea dei due partner del progetto di automatizzare un processo attualmente manuale, portando così il mondo dell’automazione industriale alla campagna.
Tecnologie già conosciute nel settore industriale vengono per la prima volta utilizzate allo scopo di rendere il lavoro di raccolta frutta meno gravoso per gli operatori e garantire una costanza di processo nettamente superiore all’attuale. L’unione di mobilità autonoma e robotica permette di creare un sistema altamente tecnologico che rientri nel target economico di macchinari agricoli di raccolta.
Il sistema è pensato per rendere meno faticoso il processo di raccolta frutta, garantendo una costanza di processo nei momenti di necessità. L’utilizzatore finale avrà una riduzione di costi con un aumento di efficienza rispetto agli attuali processi manuali oltre alla massima flessibilità di raccolta in base alle necessità.